lovelyyoshino
|
敢敢のwings · 具身智能架构师 · 前自动驾驶从业者
阿里云/华为云专家 | CSDN博客专家 | 古月居签约作者 | 深蓝学院/计算机视觉Life课程合作者
《从ROS1到ROS2》作者 · 智元生态平台合作作者 · 7W+粉丝 · 专注端到端与具身智能
About Me
$ cat profile.json
{
"name": "马培立",
"alias": "lovelyyoshino",
"role": "具身智能架构师",
"location": "上海静安",
"expertise": [
"具身智能",
"大模型",
"自动驾驶",
"SLAM"
],
"languages": ["C++", "Python"],
"frameworks": ["ROS", "PyTorch", "CUDA"],
"achievements": {
"github_stars": 4000+,
"csdn_followers": 70000+,
"book_sales": 7000+,
"patents": 10+
}
}
$ ▊欢迎来到「Pony的工作空间」!
本人是一位前自动驾驶资深从业者,现担任具身智能架构师角色,著有《从ROS1到ROS2无人机编程实战指南》一书。
作为阿里云专家博主、华为云享专家、古月居优秀创作者及签约作者、CSDN博客专家、优刻得云平台战略签约作者、计算机视觉Life讲师、深蓝学院合作推广,握有多篇发明专利授权和SCI、EI论文。
之前主要侧重机器人运动学、定位感知算法、深度学习研究,目前主要关注端到端、具身智能等方面,平时涉猎较广。
有商务合作或咨询需求可站内私信,或关注我团队的微信公众号【敢敢AUTOHUB】以及微信【mpl9725440】。
Skills
编程语言
机器人/自动驾驶
AI/深度学习
Projects
工作项目 · 个人开发 · 技术探索

四足狗 VLA+VLN 端到端智能抓取
基于Unitree 四足机器人,实现无图导航与VLA视觉-语言-动作融合的端到端智能抓取系统,实现多物体、多房间、多任务的抓取。
具身智能数采平台
构建大规模多模态数据采集平台,支持机器人操作数据、视觉数据、语言指令的同步采集与标注。
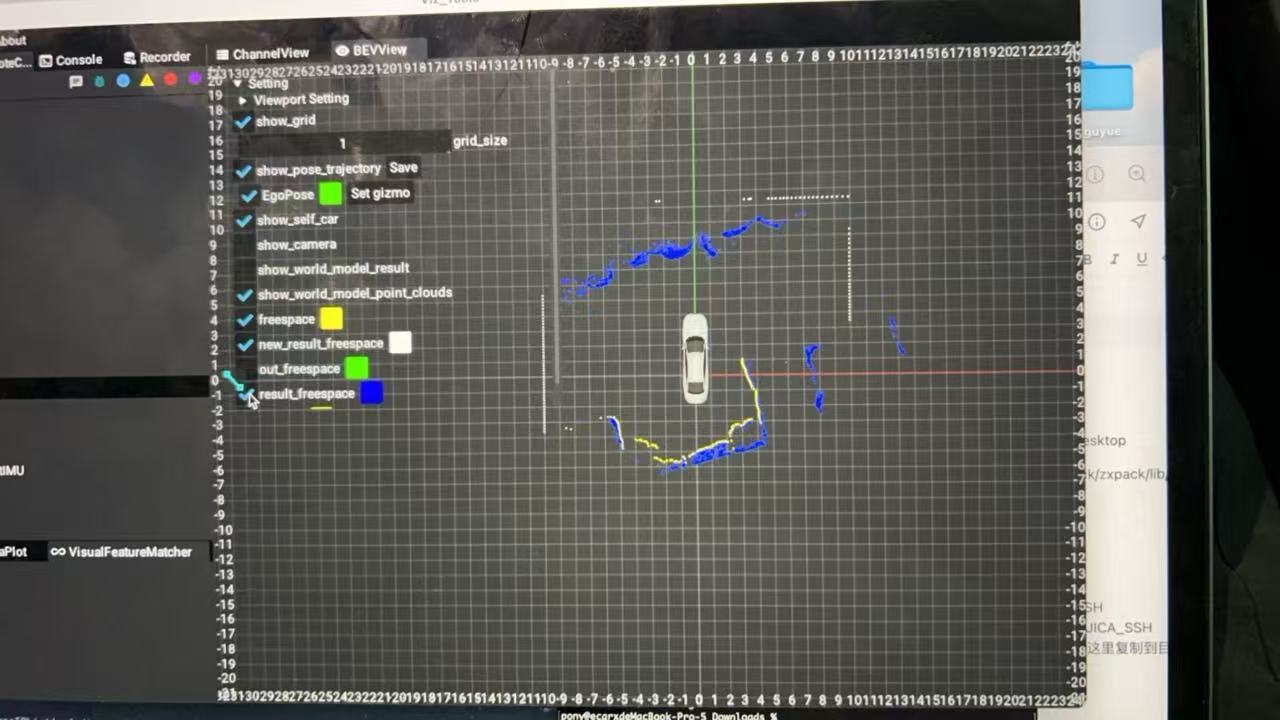
DX11 自动泊车
基于视觉深度学习与USS超声波融合的APA/RPA系统, 支持轻量级建图定位,从入库到出库的整链路无人化操作,并在领克08车型量产。
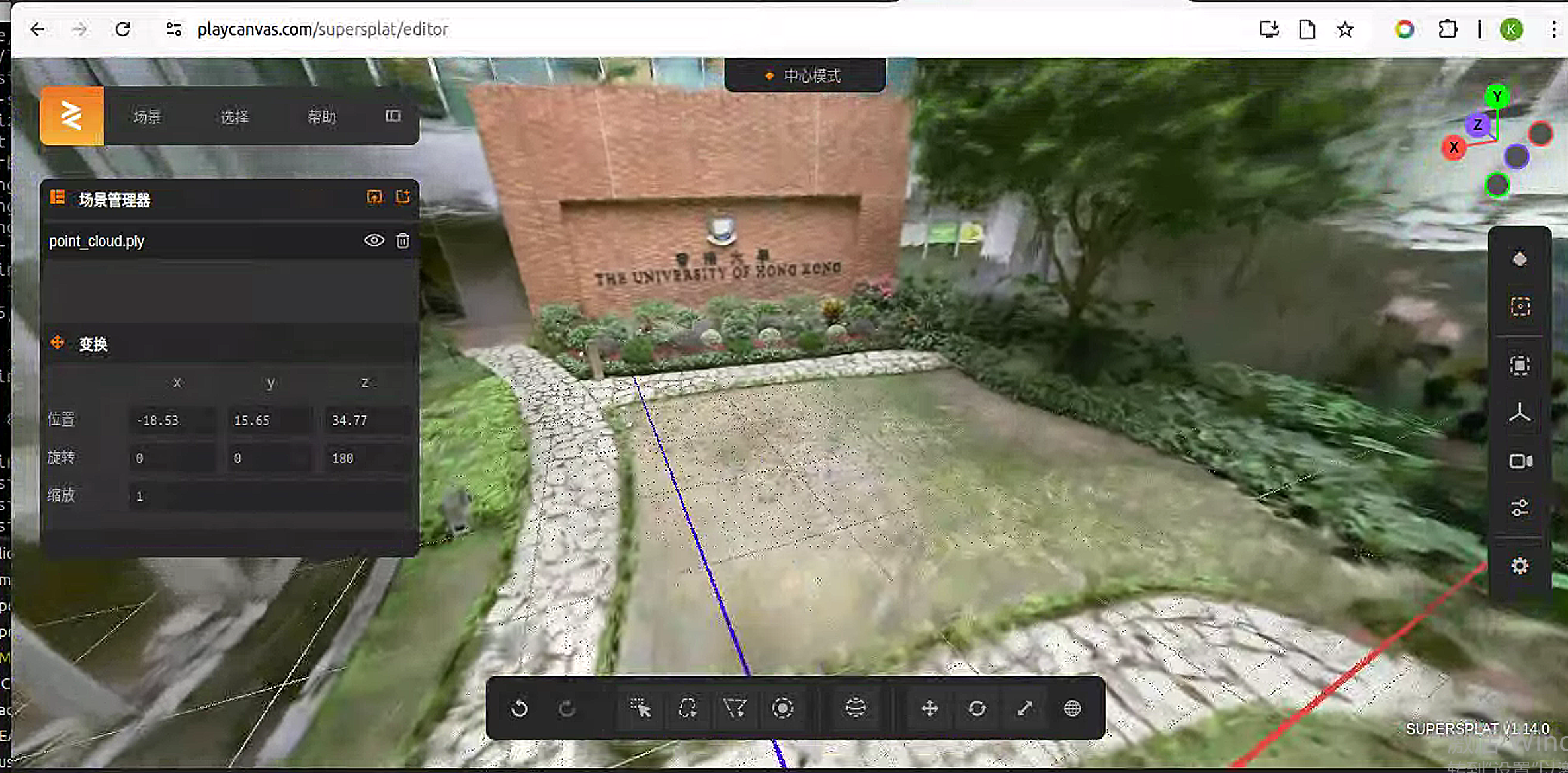
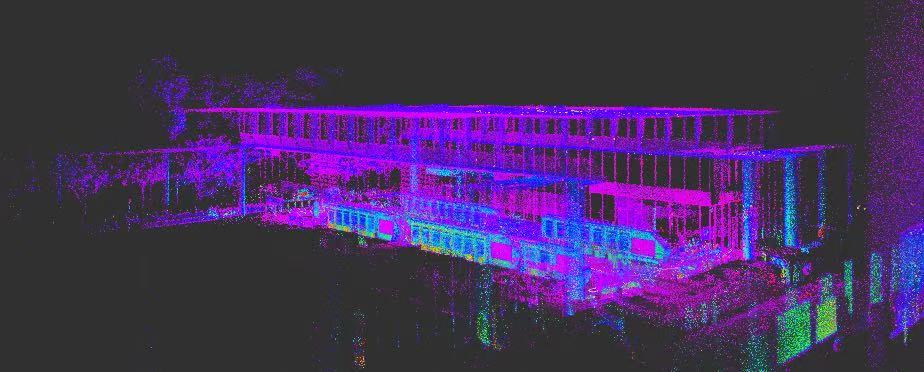
3DGS 高保真建图
高保真快速重建大范围3D场景的高斯溅射方案,使用CUDA加速与纯C++方案,实现无人机算法大范围、高保真、高效率的3D场景重建。
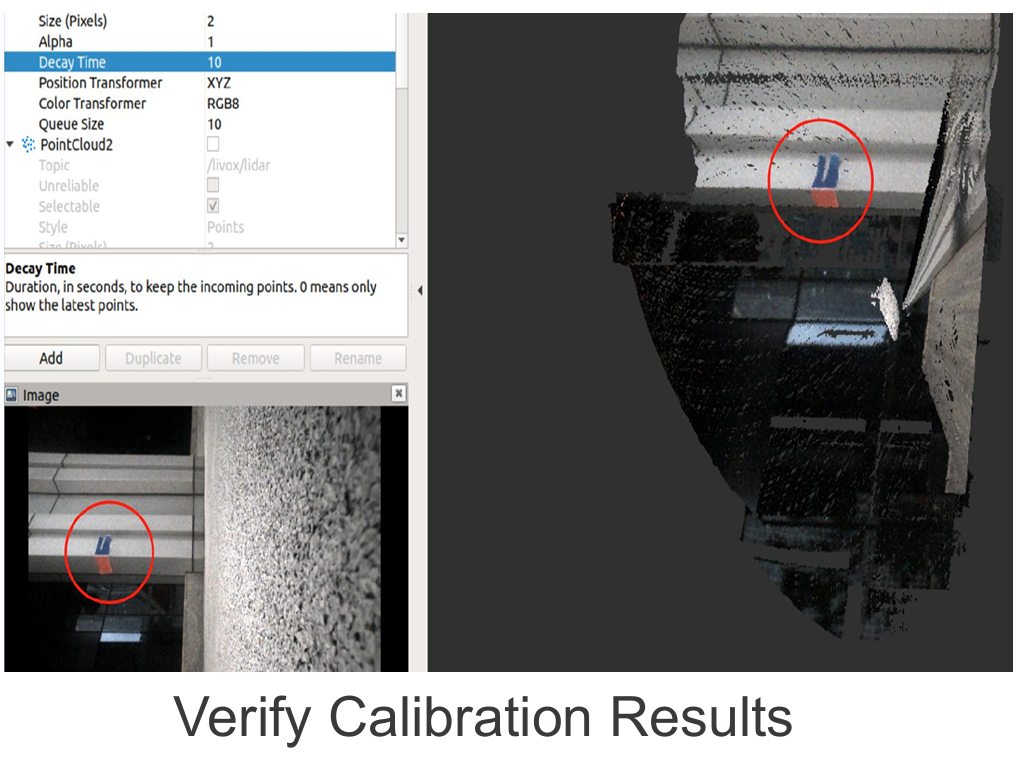
相机环视自标定
基于优化的环视标定方案,采用深度学习微调,相机-雷达联合标定。
BEV 感知部署
多种感知算法在A1000芯片端的部署和适配,完成行车模型准备。
Fast-LIO2 稠密建图
将GPS融合到IESKF中完成全局位置校准,定位精度达10cm。
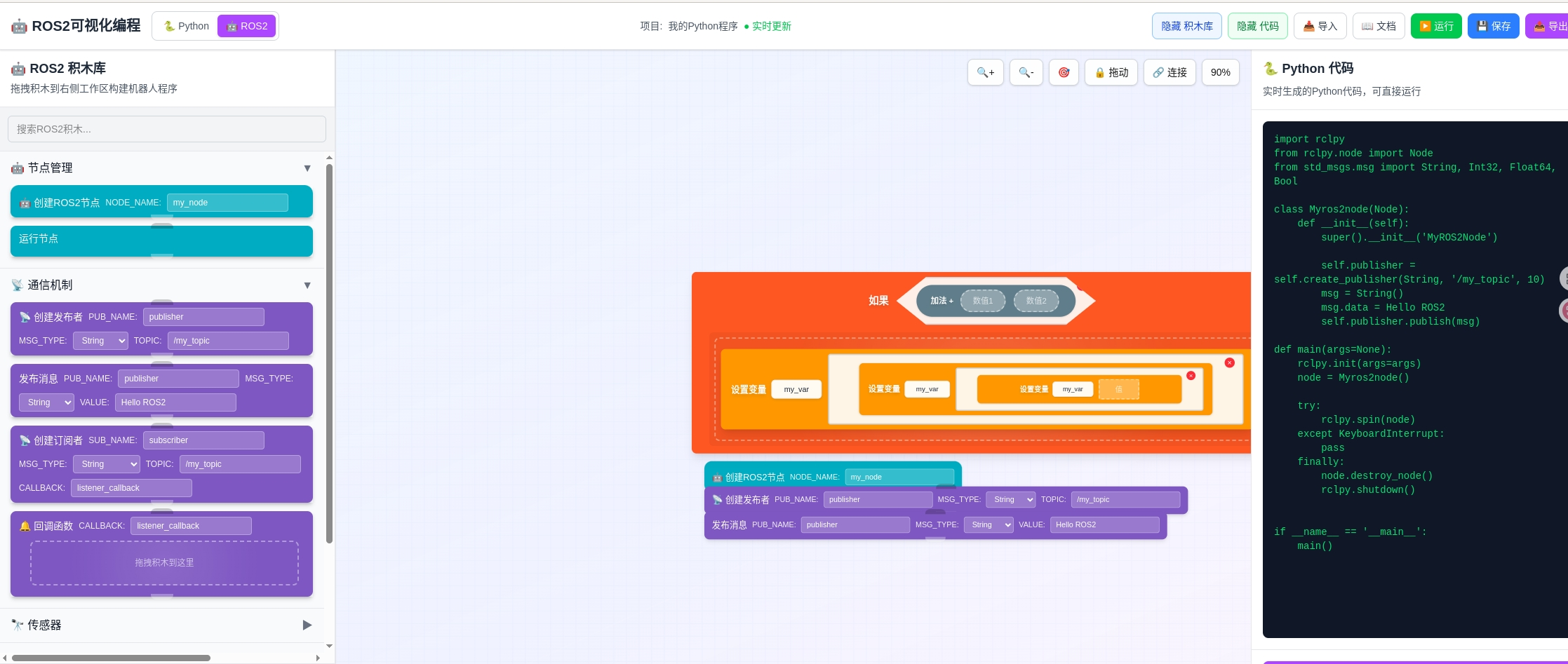
Drag Viz Scratch
基于Web的可视化拖拽式编程工具,类似Scratch的图形化编程环境,支持自定义模块开发。
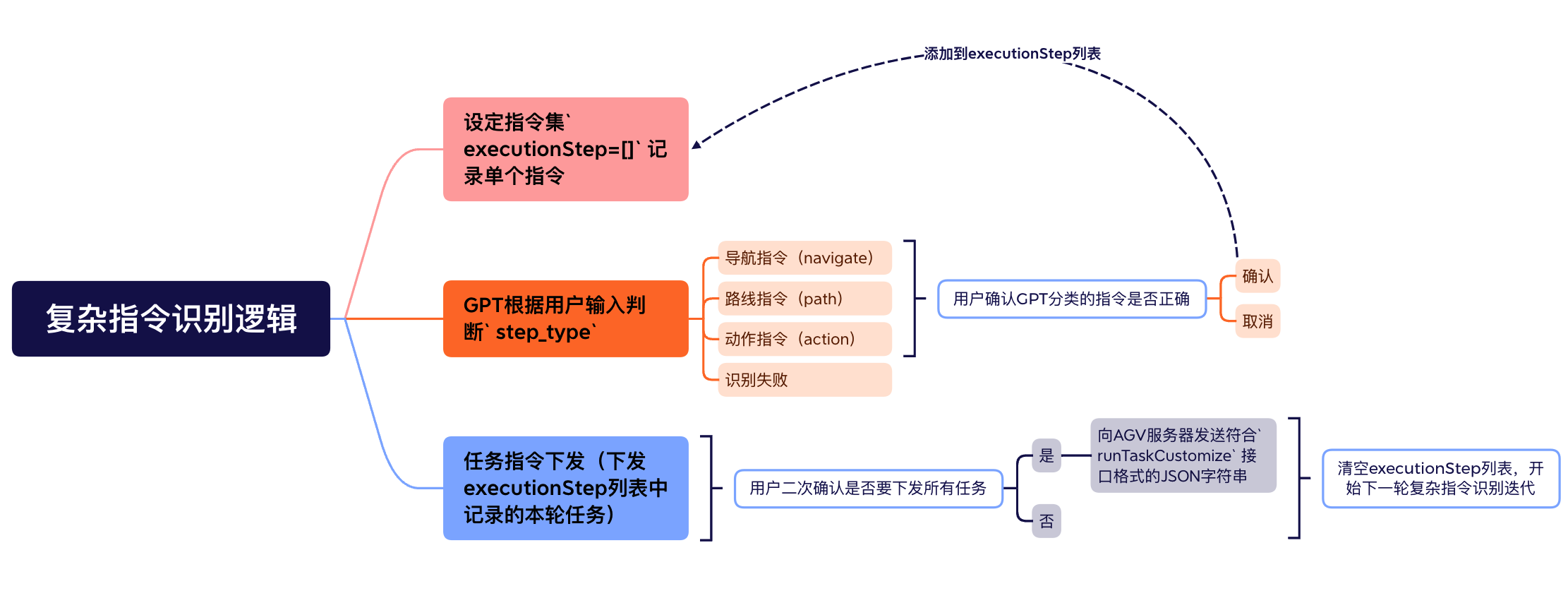
GPT Terminal AGV
基于大语言模型的微调智能终端AGV控制系统,通过自然语言实现AGV的智能调度与路径规划。
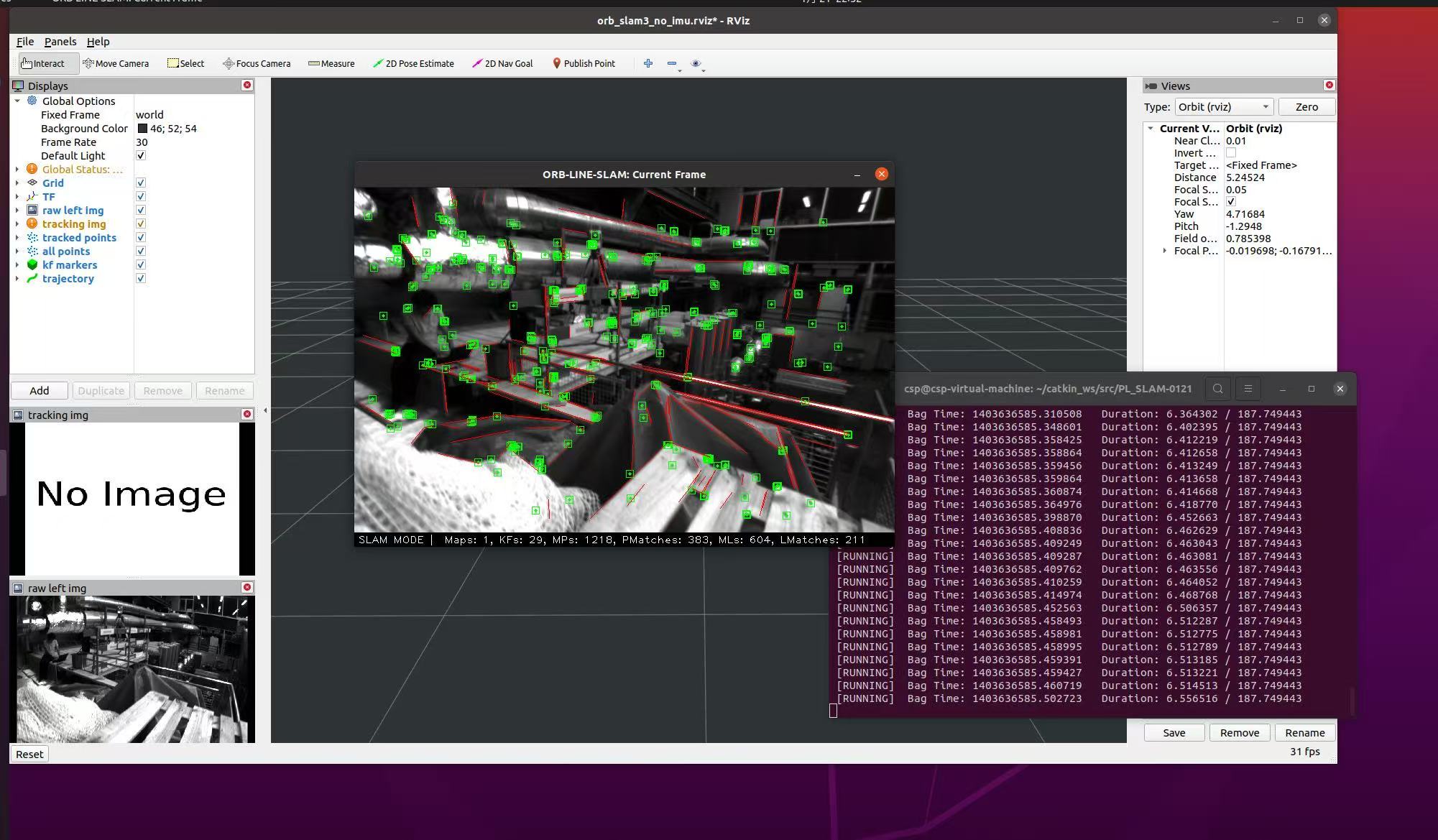
PL-SLAM3
基于点线特征的双目SLAM系统,融合点特征和线特征进行定位与建图,提升弱纹理场景下的鲁棒性。

Quantification
量化投资分析框架,提供数据获取、策略回测、风险评估等功能,支持多种技术指标分析。
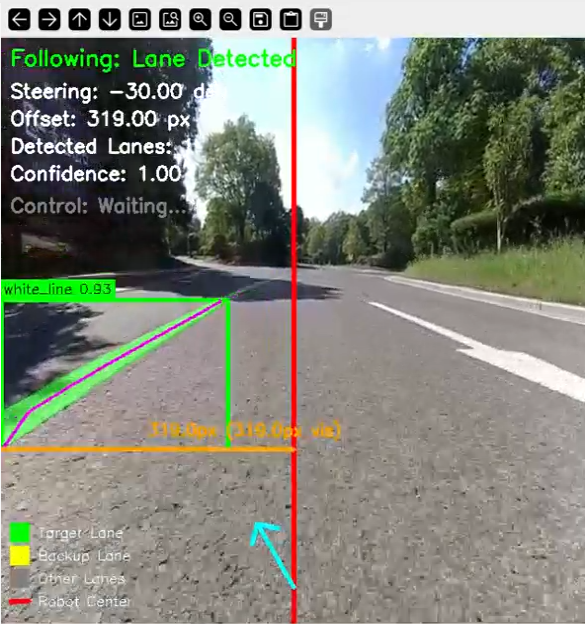
RK3588 Lane Following
基于RK3588开发板的低成本实时车道线检测LCC(Lane Change Control)系统,实现车道线识别、路径规划和自动转向控制。
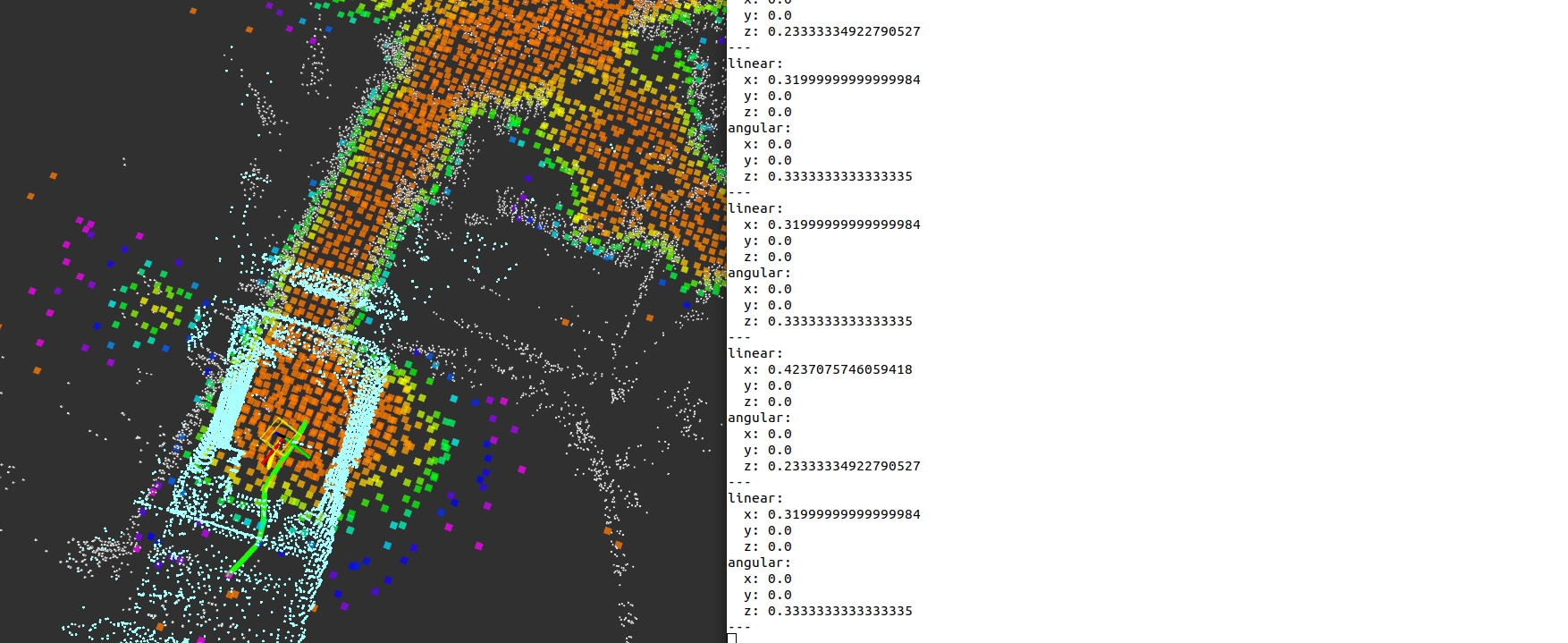
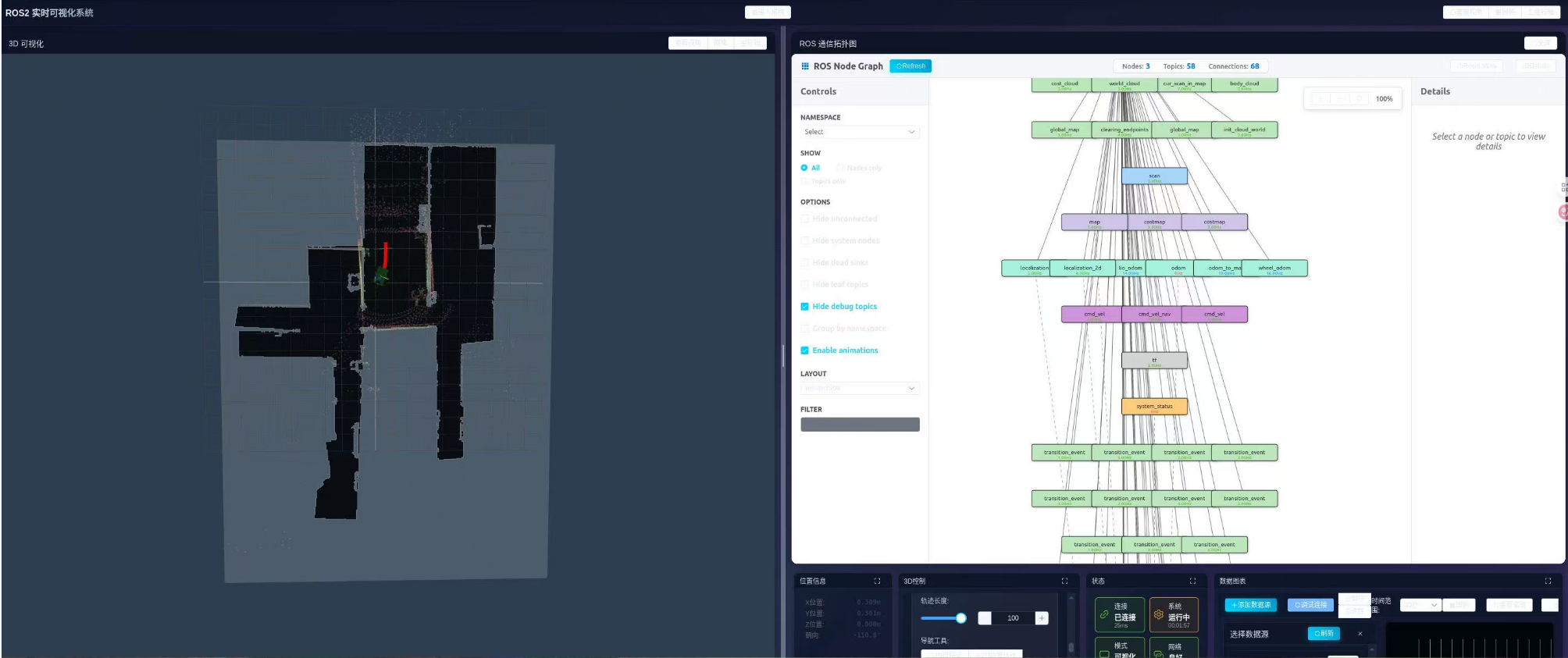
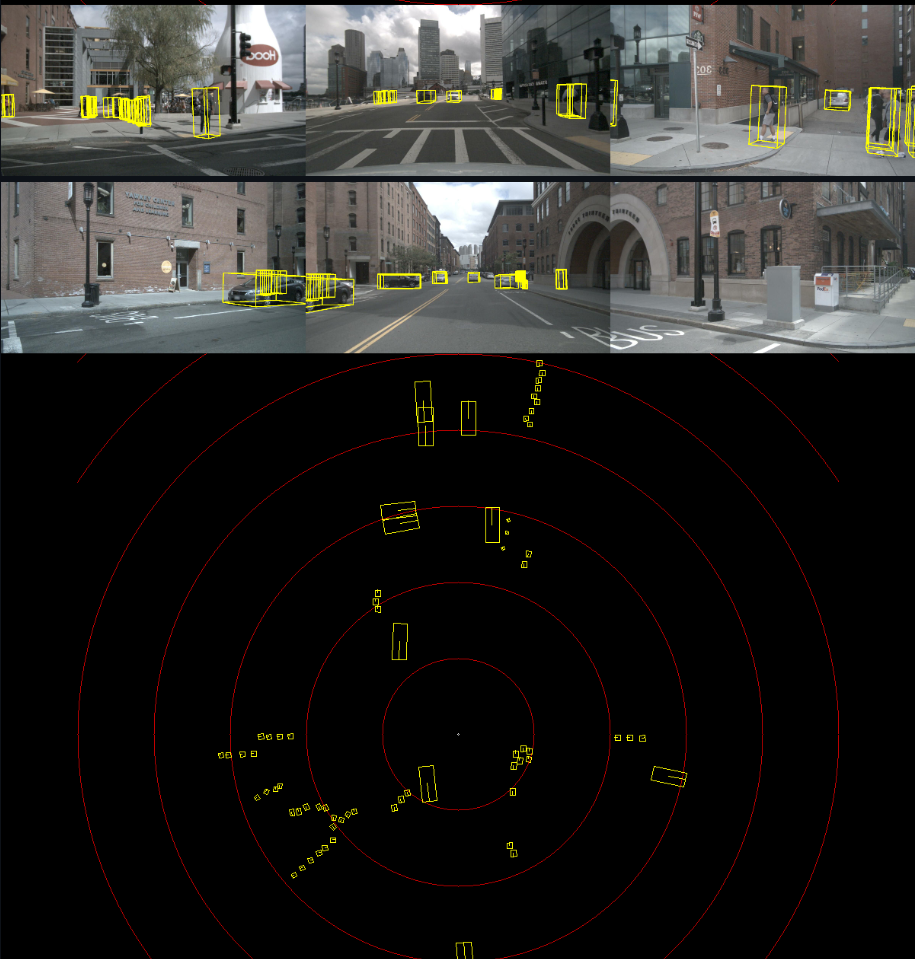
3D Navigation
支持多SLAM接入的3D导航模块,提供统一的导航接口,兼容Cartographer、FAST-LIO2、ORB-SLAM3等多种SLAM算法,实现灵活的室内外导航解决方案。
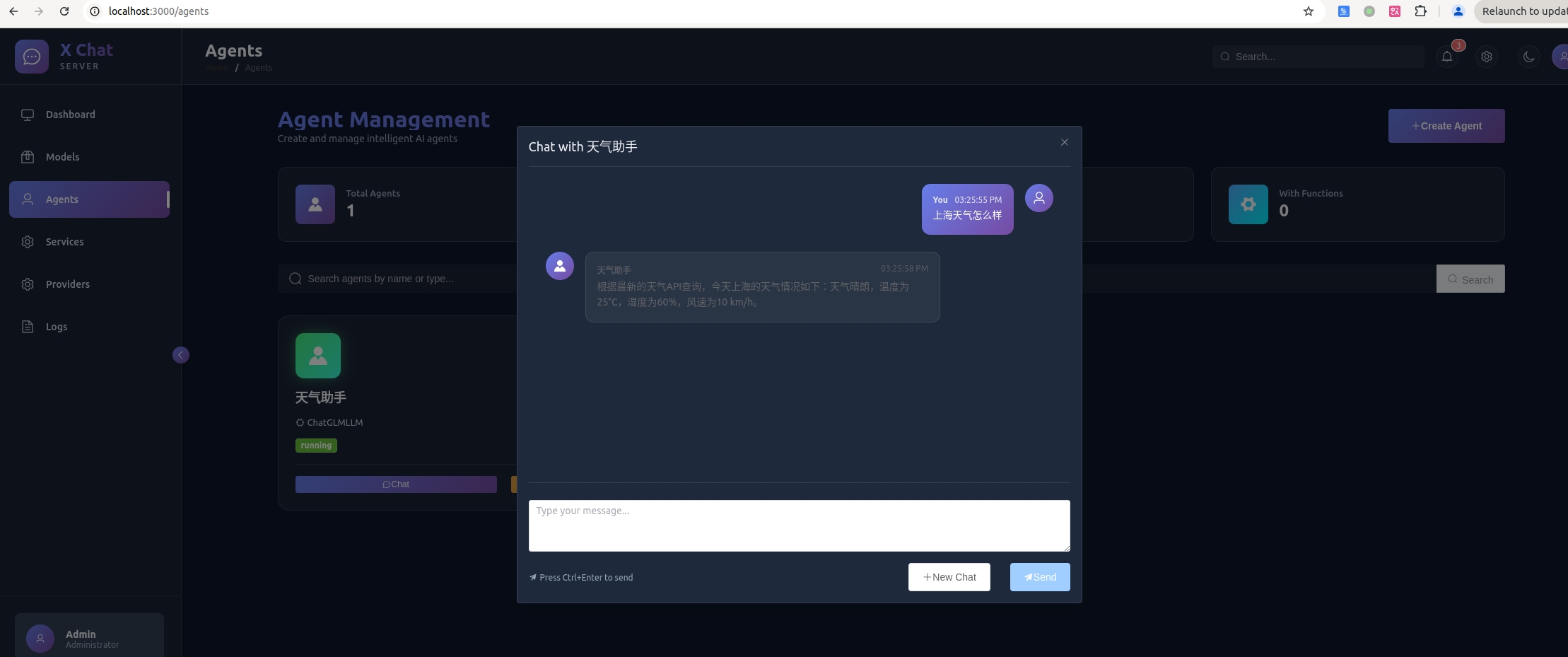
X Chat Server
智能语音视觉对话机器人 - 基于AgentScope框架 + 多模态能力 + LLM意图识别 + Web管理界面,支持API调用。
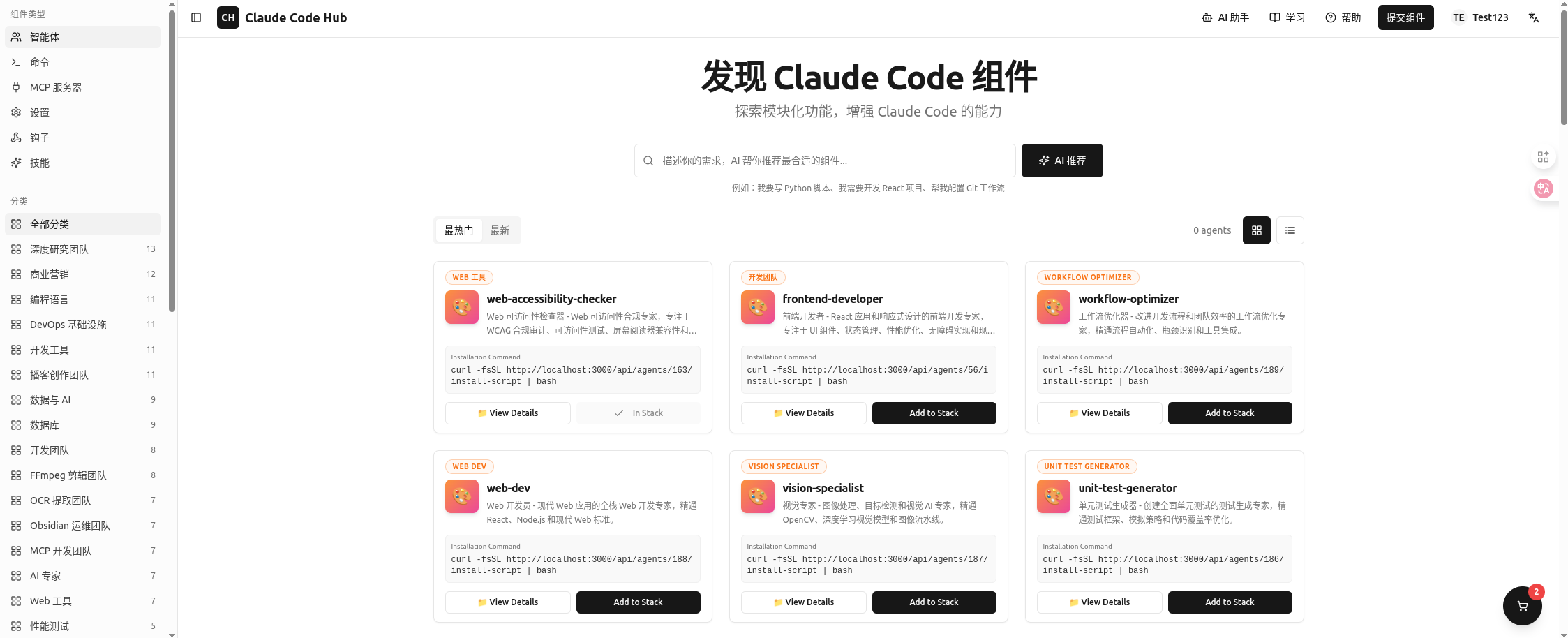
Claude Code Hub
发现Claude Code组件平台 - 探索模块化功能,增强Claude Code的能力。支持AI智能推荐、分类筛选、一键安装脚本,打造Claude Code生态组件市场。

跨境电商数据分析工具
跨境电商智能分析平台,支持多平台商品数据采集、竞品分析、价格趋势追踪与销量预测,助力卖家精准选品与运营决策。
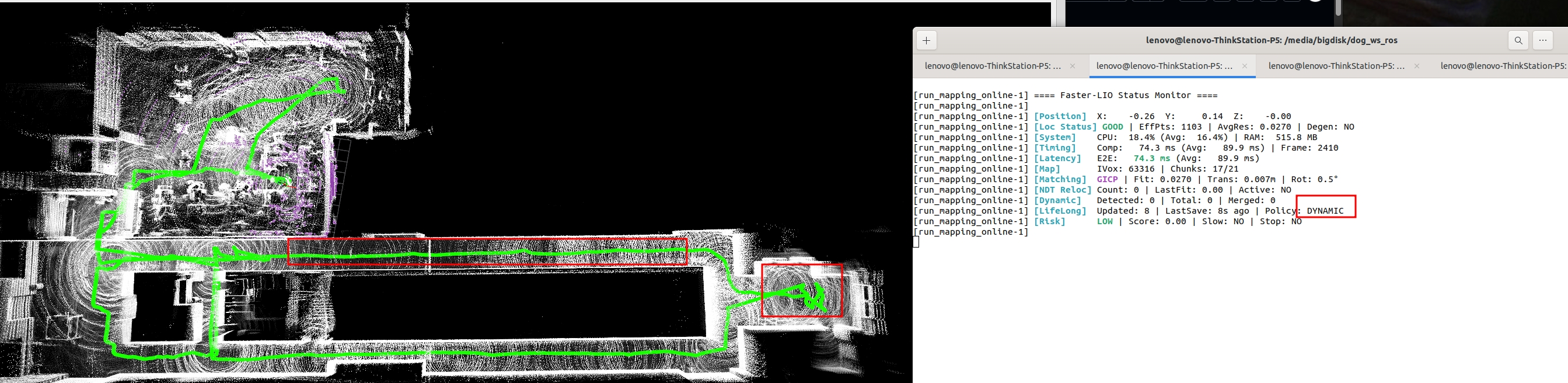
LiWO SLAM
支持Lifelong SLAM的LiWO框架,集成自动估计、长期建图与地图更新算法,实现大规模场景下的持续定位与地图维护。
Open Source
4.0K+ GitHub Stars · 开源贡献
从ROS1到ROS2无人机编程实战指南配套代码
轻量化道路裂缝分割算法,SCI一区论文(IF:11.775)
基于GLM的中文语义理解与生成大模型项目
Fast-LIO2代码分析与注释,逐行中文注释
DLIO代码分析与注释,完整中文注释
QWEN3融合轻量级VL多模态模型
基于深度学习的垃圾分类机器人
bilibili的API抓包解析
一键切换host文件工具
Halcon图像处理项目集合
智元机器人强化学习实验平台,支持Sim2Sim与Sim2Real迁移
智元机器人强化学习Sim2Sim与Sim2Real部署框架
GitHub & CSDN Stats
Published Book
《从ROS1到ROS2无人机编程实战指南》
本书站在初学者的角度,从入门到进阶,再到实战,循序渐进地讲解ROS1和ROS2的无人机开发。 国内首本系统性ROS2无人机编程实战指南。
- 详细环境配置教程
- ROS1到ROS2进阶
- 中文代码注释
- 零成本实操平台
- SLAM算法解析
- 机器人交互进阶
Get in Touch
让我们保持联系!
如果你对我的项目感兴趣,想要技术交流,或者有商务合作需求,欢迎通过以下方式联系我。

微信公众号
敢敢AUTOHUB
扫码关注获取技术分享与书籍咨询